Marginal Revenue Formula
Marginal Revenue Formula | What is Marginal Revenue? Marginal Revenue Formula is the revenue that is gained from the …
Marginal Revenue Formula | What is Marginal Revenue? Marginal Revenue Formula is the revenue that is gained from the …
Retained Earnings Formula Retained earnings Formula (REF) is the amount of net income left over for the business …
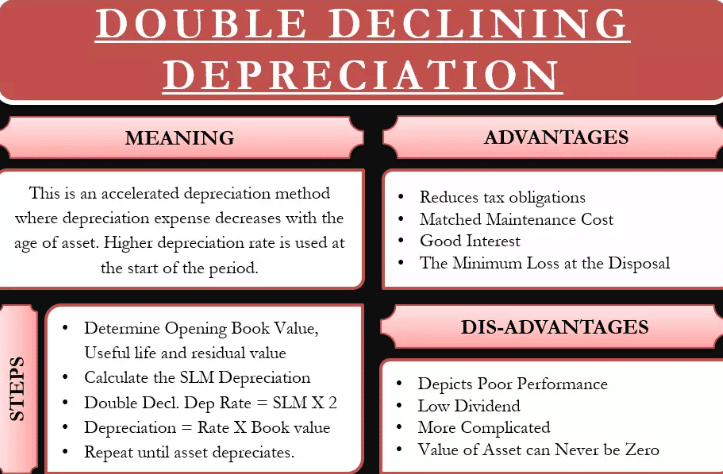
Double Declining Balance Method: The double declining harmony method of reduction, also known as the 200% declining balance method …
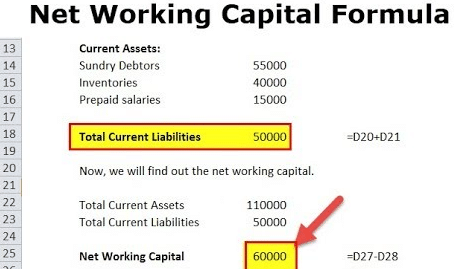
What Is Net Working Capital? Net Working Capital: Net working capital (NWC) is the characteristic between a company’s …
Times Interest Earned Ratio Times Interest Earned Ratio: The time’s importance earned (TIE) ratio is a quota of …

In today’s competitive global market, businesses constantly strive for efficient and cost-effective solutions to stay ahead of the …
Use Grout as mortar: When building a house, you need to see to it you get whatever is correct, …
How to bury PEX: Piping is a vital element of any building project. It is a conduit for …

Shower Making A Loud Vibrating Noise: Is your shower creating a loud vibrating noise that’s making you so …

Ovaltine Vs. Milo: Ovaltine and Milo are among the most reknown powder malt drinks worldwide. Nearly all shops, …